


La Nave scuola Orsa Maggiore (© Marina Militare)
La stabilità delle navi: stabilità statica
Nella prima e seconda parte ho cercato di spiegare, spero in modo semplice, i concetti principali utili per capire la stabilità statica e dinamica delle navi, che espliciterò in questa terza e successiva quarta e ultima parte.
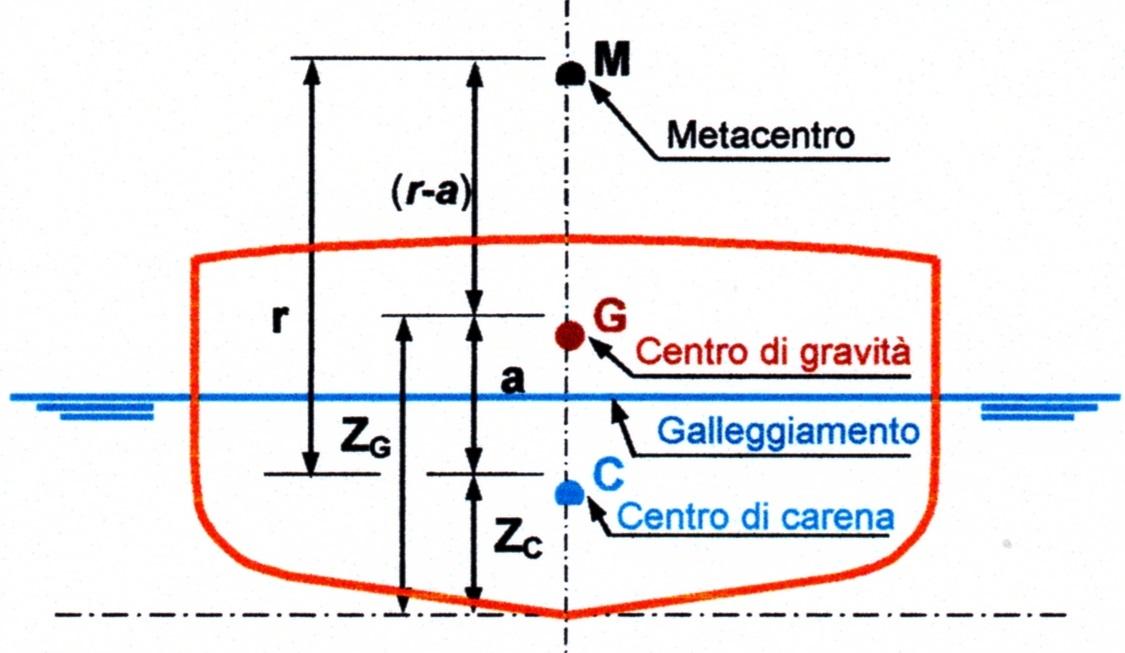
Il raggio metacentrico trasversale \(r\) (Figura 1) è determinato dal rapporto tra il momento d’inerzia trasversale della figura di galleggiamento e il volume di carena, cioè \(r=(I_t⁄∇)\). In una nave (Figura 12), per piccoli angoli \(α\) (inferiori a 12°) d’inclinazione trasversale, \(M\) è il metacentro trasversale, cioè il centro della curva che unisce i centri di carena ai vari sbandamenti, per cui se il centro di gravità \(G\) è al di sotto del metacentro trasversale si ha \((r-a)>0\) (Figura 12a).
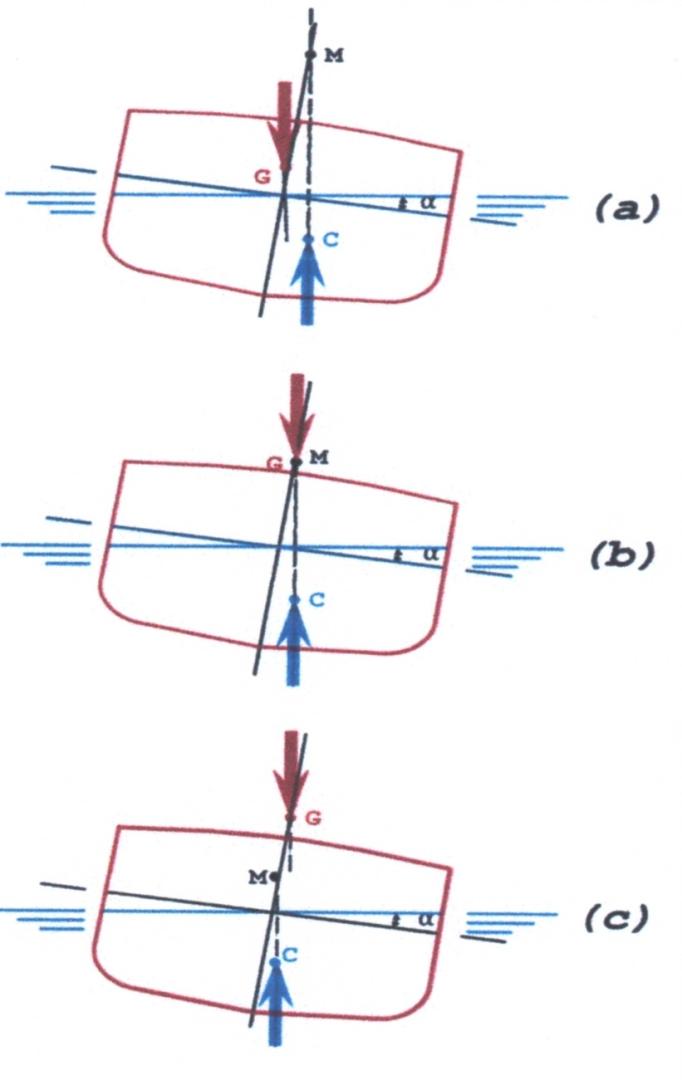
Invece se il centro di gravità \(G\) è al di sopra del metacentro trasversale \(M\) si ha\((r-a)<0\) (Figura 12c), per cui l’equilibrio risulta instabile. In questo caso, come il cilindro della Figura 11, la nave sbanderà lateralmente fino a quando il centro di gravità \(G\) ed il centro di carena \(C\) si troveranno sulla stessa verticale perpendicolare al galleggiamento e il metacentro trasversale \(M\) diventerà maggiore di \(G\). In questa posizione la nave rimane inclinata ed è definita “ingavonata”. Resta ora da considerare il caso in cui si abbia \((r-a)=0\) (Figura 12b). Prima di tutto è da osservare che è ben difficile che si abbia rigorosamente l’uguaglianza \(r=a\). Ammesso pure che si volesse realizzare di proposito l’uguaglianza, difficilmente la si potrebbe ottenere poiché si avrebbe sempre una differenza, sia pure piccolissima, in più o in meno. Infatti, i valori di \(r\) e di \(a\) non si possono determinare in modo rigoroso. Basta pensare come sarebbe difficile calcolare con precisione matematica la posizione del centro di gravità di una nave, data l’enorme complessità dei pesi che compongono la nave stessa. Pertanto la differenza \((r-a)\) può essere piccolissima, positiva o negativa, cioè maggiore o minore di zero, ma quasi mai uguale a zero. Quindi, nel caso della nave, la condizione \((r-a)=0\) appare come un caso raramente realizzabile. Come si è detto, se una causa esterna inclina la nave di un piccolo angolo, la condizione \((r-a)>0\) assicura la stabilità dell’equilibrio della nave nella posizione iniziale, cioè la nave riprende la posizione iniziale al cessare della causa esterna. Si deve ora considerare cosa avviene se questa causa esterna inclinasse la nave di un angolo comunque grande. Certamente la sola condizione di \((r-a)>0\) non sarà sufficiente alla nave a riprendere la posizione iniziale al cessare della causa esterna. Se vogliamo che la nave affronti con sicurezza la navigazione con mare mosso e vento, cause principali di forti inclinazioni trasversali, è necessario avere altri elementi, oltre che della sola condizione di \((r-a)>0\) , che riguarda la stabilità iniziale. Il diagramma di stabilità trasversale fornisce questi elementi importanti.
Il diagramma di stabilità trasversale si può definire come la curva che ha in ascissa l’angolo d’inclinazione trasversale ∝ ed in ordinata il momento di stabilità \(M_{St}\) che la nave oppone quando si trova all’angolo \(∝\) d’inclinazione trasversale. Il momento di stabilità \(M_{St}\) è dato dal prodotto del braccio di stabilità moltiplicato per il dislocamento della nave
\(M_{St}=b_{St} \cdot ∆\)
dove \(M_{St}\) = momento di stabilità trasversale
\(b_{St}\) = braccio di stabilità trasversale
\(∆\) = dislocamento della nave
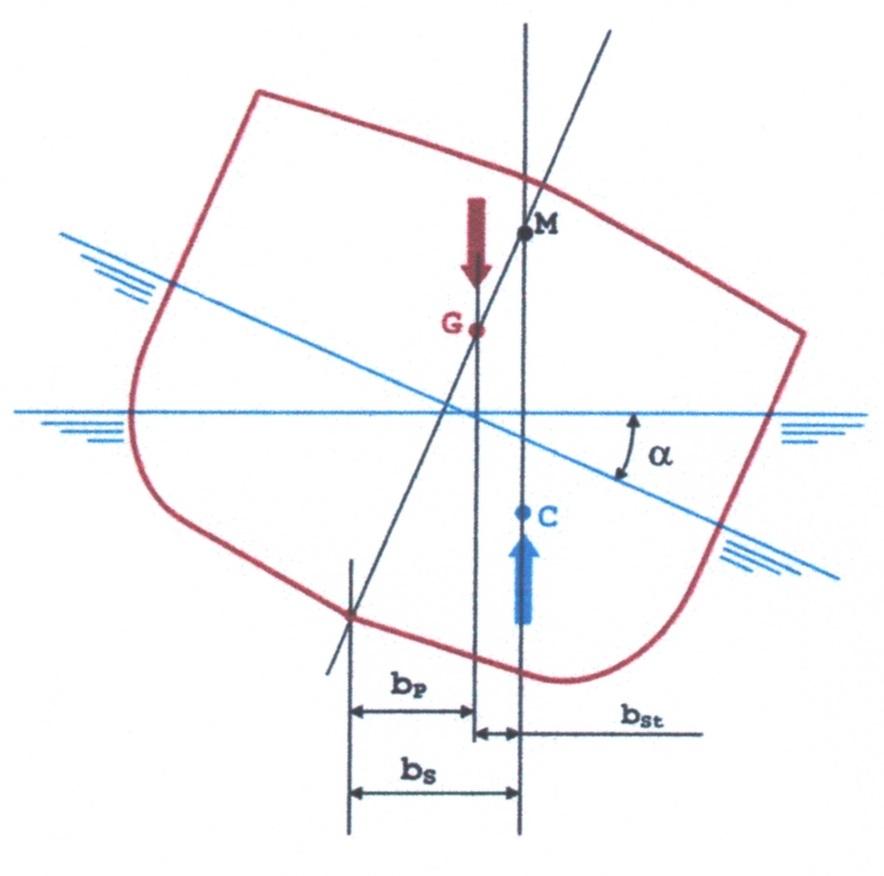
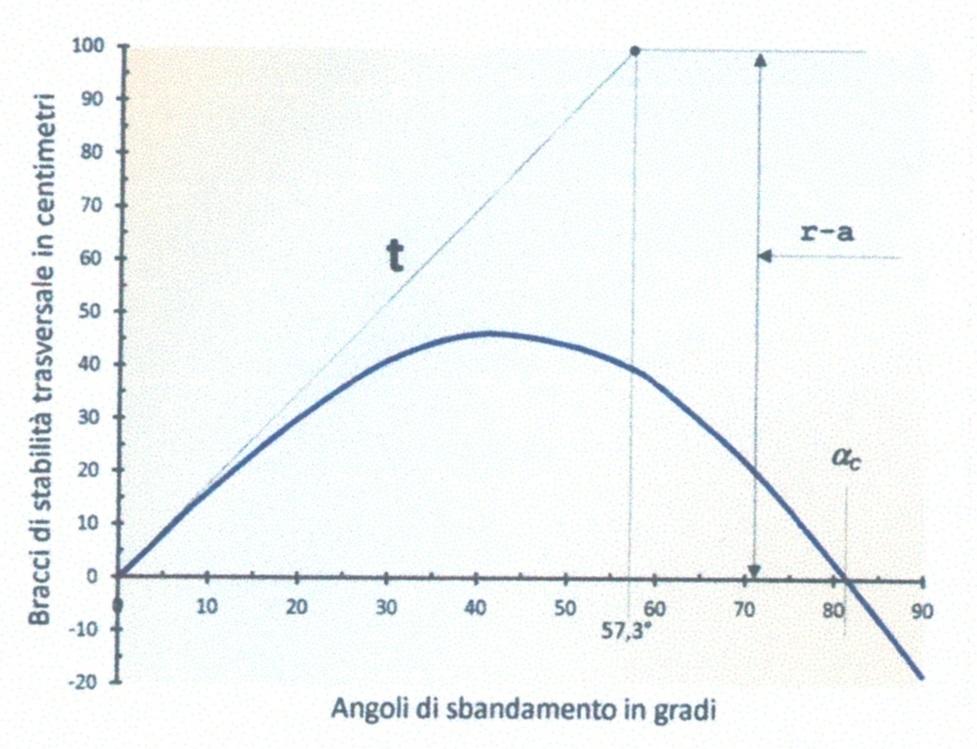
Il braccio di stabilità trasversale \(b_{St}\) è dato dalla differenza tra il braccio di spinta \(b_S\) ed il braccio del peso \(b_{P}\) (Figura 13). Se mettiamo in un diagramma, che ha come ascissa gli angoli di sbandamento trasversali, i bracci di stabilità in ordinata otteniamo un grafico come quello della Figura 14. Tale curva ha una caratteristica: unendo due punti ben precisi, l’origine degli assi cartesiani e il punto che ha come coordinate \(X = 57,3\) (un radiante) e \(Y = (r – a) \), si ottiene la tangente all’origine della curva dei bracci di stabilità. L’angolo \(∝_C\) si chiama “angolo di capovolgimento” e non angolo di stabilità nulla, perché, come giustamente osserva il Gleijeses, in \(∝_C\) è nullo il momento di stabilità e non la stabilità (ossia l’altezza metacentrica) che è negativa.
La quantità \(∆ \cdot (r-a)\) si chiama “coefficiente di resistenza alla inclinazione trasversale”. Questo coefficiente rappresenta la capacità che ha la nave a non lasciarsi deviare dalla posizione iniziale. Questa capacità di reazione al momento sbandante dipende, quindi, dal peso della nave \(∆\) e dall’altezza metacentrica \((r-a)\).
Se una nave ha il metacentro \(M\) che sta sotto il centro di gravità \(G\) si ha una stabilità negativa, cioè sia ha \((r-a)<0\). Quindi la nave, per effetto di una qualsiasi piccola forza, si inclinerà trasversalmente fino ad un angolo \(∝_1\) (Figura 15), dove il metacentro \(M\) andrà sopra il centro di gravità \(G\) , per cui la stabilità diventerà positiva e sarà \((r-a)>0\) . Per cui si otterrà un grafico come quello della Figura 15. L’angolo \(∝_1\) di equilibrio stabile quando è inferiore a 15° si chiama “angolo di ingavonamento”, quando è superiore a 15° si chiama “angolo di abbattimento”. L’area E possiamo definirla come la quantità di energia che la nave ha per opporsi all’eventuale forza sbandante. Quindi, quanto maggiore sarà questa superficie tanto più sicura sarà la nave.
Nella quarta e ultima parte parlerò della stabilità dinamica delle navi.
Angelo Sinisi
©PressMare - riproduzione riservata




